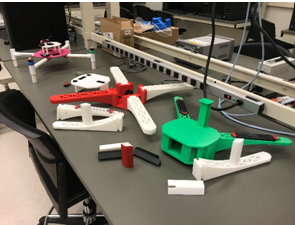
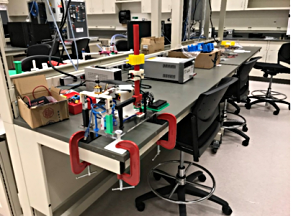
MD Sc Lab/ Unmanned Aerial System Design laboratory, located in EASC building room 2028, can accommodate 20 students with two per station. The Unmanned Aerial Design Laboratory is developed to support faculty and student research activities in the Design and Prototype of Unmanned Aerials Vehicles. The Unmanned Aerial Design Laboratory was initiated by Dr. Payam Matin with significant departmental supports and partial funding from Maryland Space Grant Consortium, and Army Research Lab. The lab has provided opportunities for multiple faculty with several specialties from both Engineering and Aviation Sciences programs to collaborate for design, prototype and operation of unmanned aerial systems. The lab makes use of 1) structural analysis for structural design of aerial platforms using CAD and FEM software, 2) 3D-printing for rapid prototyping of aerial platforms, 3) Microprocessors and electronics to operate and control unmanned aerial platforms. Several aerial platforms have been designed and prototyped. Besides, several Testbeds have been designed and prototyped to validate the performance of the aerial systems.
laboratory also has been outfitted with P.A. Hilton equipment including:
HTM81 Gear Efficiency Apparatus
HTM13 Double Epicyclic Gear Train
HAC40 Stroboscope
HTM67 Whirling of Shafts
HTM19 Hooke’s Coupling
HTM 20 Ackermann Steering Gear
HTM78 Four Bar Chain
HFC26 Apparatus for Static Experiments
HFC26A Inclined Plane and Friction
HFC26B Block and Tackle
HTM25 Gear Train Apparatus
HTM77 Slotted Link Apparatus
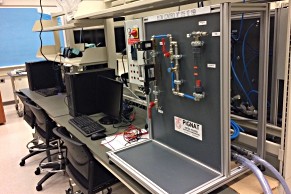
Temperature Control BRT/1000
Level Control BRN/2000
Flow Control BRD/2000
Pressure Control BRP/2000
Two UltiMaker S5 3D printers